Robot - R56TB - Vypnutí pípání na teaching boxu a kontroléru robota
Robot - R56TB - Vypnutí pípání na teaching boxu a kontroléru robota
Budeme potřebovat teaching box R56TB.
Parametry k nastavení:
BZR: 0 (pípání kontroléru)
TBZR:0 (pípání teaching boxu)
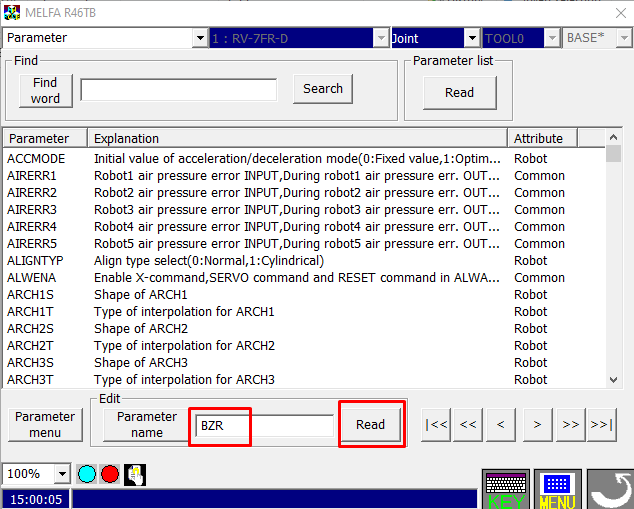
V okně Parameter zapište do spodního okénka Edit
parametr BZR a zmáčkněte tlačíto Read.
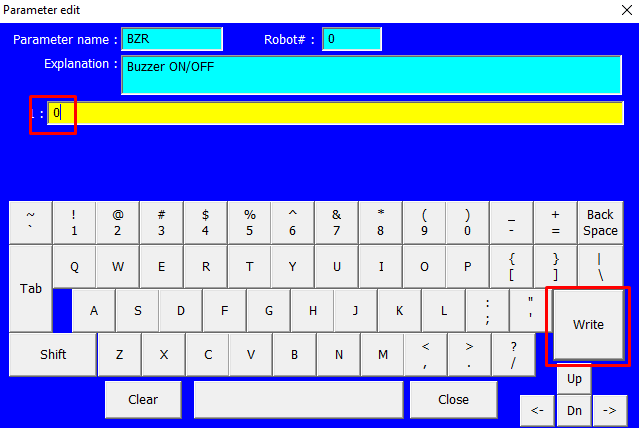
Zapiště hodnotu 0 a zmáčkněte tlačítko Write. Po
zapsání se zobrazí hláška, že k provedení změn je potřeba restartovat
kontrolér.
Pro vypnutí pípání také na teaching boxu proveďte to
samé, ale s parametrem TBBZR.
Následující článek popisuje,
jak vypnout pípání teaching boxu a kontroléru robota pomocí teaching boxu
R56TB.
Parametry k nastavení:
BZR: 0 (pípání kontroléru)
TBZR:0 (pípání teaching boxu)
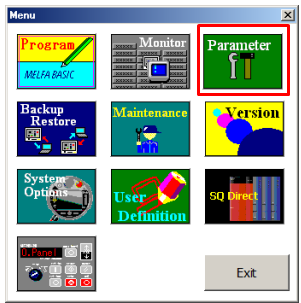
Na hlavní obrazovce R56TB zmáčkněte tlačítko Menu a
následně Parameter.
Related Articles
Změna typu kontroléru CR800-D <--> CR800-R & CR800-D <--> CR800-Q
Tento článek popisuje změnu typu kontroléru CR800-D na typ CR800-R a CR800-D na typ CR800-Q. Při změně typu kontroléru se programy a parametry resetují do výchozího nastavení! This project contains information about changing controller CR800-D <--> ...Robot RH-CH – kabeláž pro nástroj
Robot RH-CH – kabeláž pro nástroj Kabeláž pro nástroj Výstupy na straně ramene (d-sub 15 pinů - samice) Výstupy na základně robota (d-sub 15 pinů - samice) Vnitřní kabeláž Ethernetové připojení Doporučujeme vést ethernetový kabel po těle robota. ...RTToolbox3: Ethernetová komunikace s roboty řady Q a R
Snímky níže ukazují nastavení komunikace metodou CRn-Q/R. Počítač musí být zapojený pomocí ethernetového kabelu do portu na PLC. Příklad nastavení pro RT Toolbox3 Příklad nastavení pro RT Toolbox2Ovládání vstupů / výstupů na iQR přímo z CPU robota
Při použití robotických CPU na iQR systému je možné ovládat vstupní / výstupní karty na PLC platformě přímo z robotického CPU. V systémových parametrech je možné vybrat, které CPU bude vstupní / výstupní karty řídit: Pokud přiřadíme ovládání vstupní ...Nastavení přídavné osy (externí)
Nastavení přídavné osy (externí) Tento článek popisuje, jak nastavit a naprogramovat přídavnou osu robota jako samostatný mechanismus (například otočný stůl). Detailní infromace jsou k nalezení v manuálu: ADDITIONAL AXIS FUNCTION INSTRUCTION MANUAL ...