Robot RH-CH – kabeláž pro nástroj
Robot RH-CH – kabeláž pro nástroj
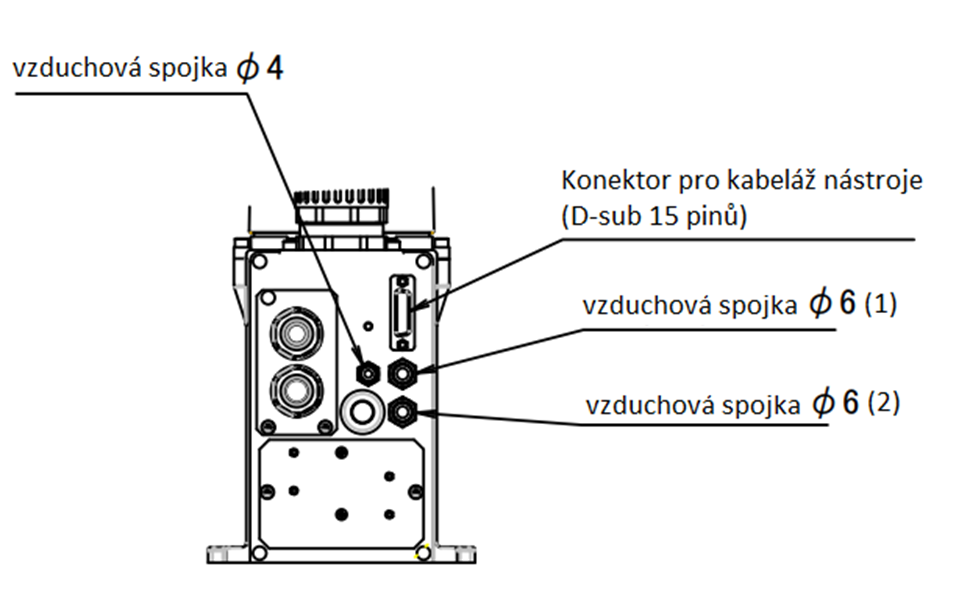
Výstupy na základně robota
Vnitřní kabeláž
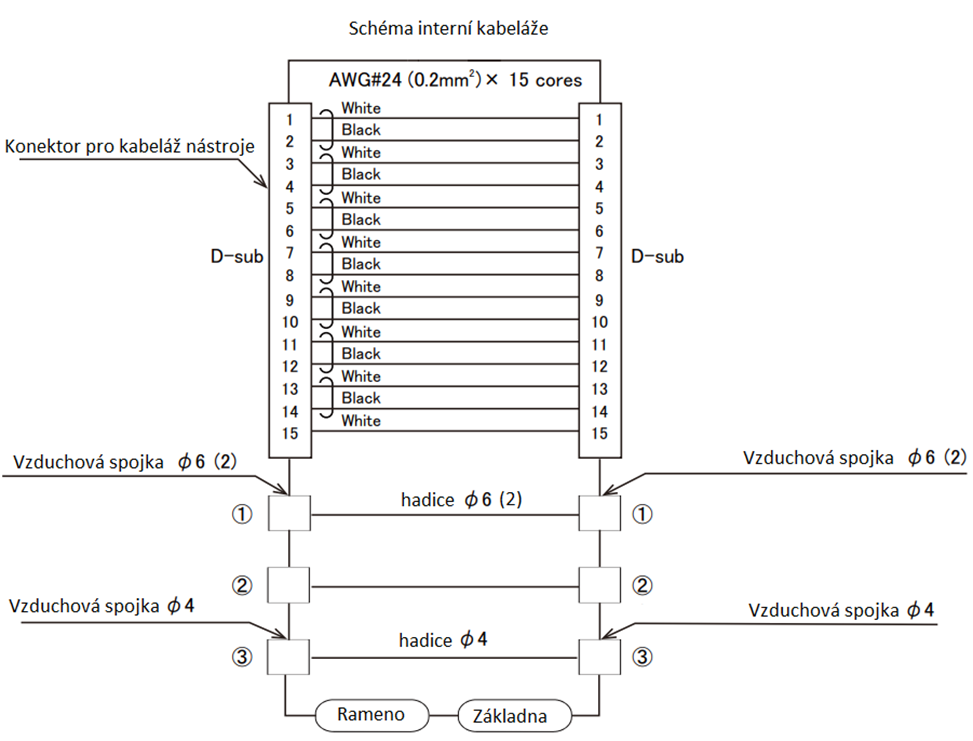
 Uvnitř robota
jsou nestíněné volné kabely.
Uvnitř robota
jsou nestíněné volné kabely.
Nemůžeme zaručit, že bude komunikace stabilní.

Kabeláž pro nástroj
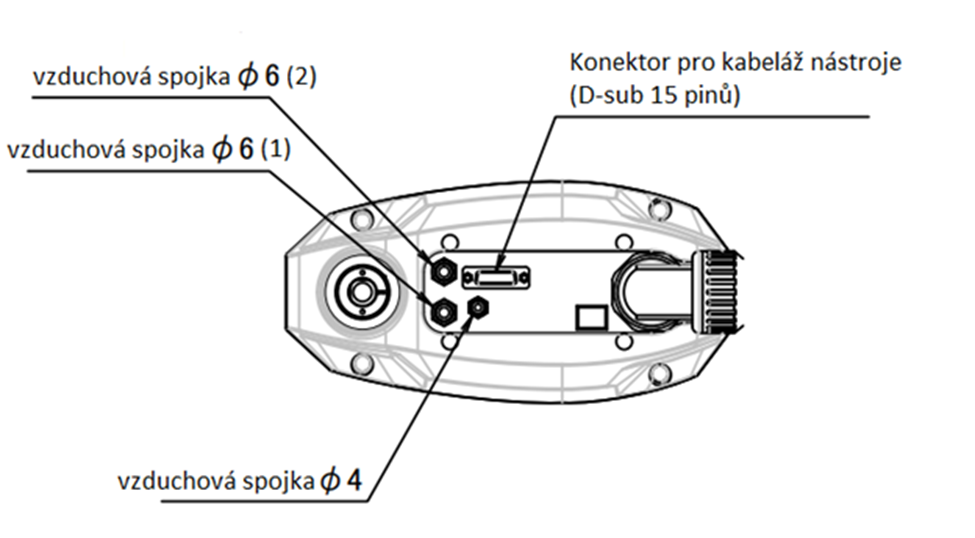
Výstupy na straně ramene
(d-sub 15
pinů - samice)
Výstupy na základně robota
(d-sub 15 pinů - samice)
Vnitřní kabeláž
Ethernetové připojení
Doporučujeme
vést ethernetový kabel po těle robota.
Konektor D-sub není určený pro
Ethernetovou komunikaci.
Nemůžeme zaručit, že bude komunikace stabilní.
Related Articles
Robot - R56TB - Vypnutí pípání na teaching boxu a kontroléru robota
Robot - R56TB - Vypnutí pípání na teaching boxu a kontroléru robota Následující článek popisuje, jak vypnout pípání teaching boxu a kontroléru robota pomocí teaching boxu R56TB. Budeme potřebovat teaching box R56TB. Parametry k nastavení: BZR: 0 ...Srovnání funkcionality robotů
V tomto článku můžete vidět rozdíl mezi funkcemi různých robotů s kontrolérem CR800. Legenda ○ funkce / opce dostupná ⎻ funkce / opce nedostupná Funkce / opce RH-FR RH-CRH RV-FR RV-5AS RV-8CRL CC-Link IE Field Basic ○ ○ ○ ○ ○ Komunikační rozhrání ...RTToolbox3: Ethernetová komunikace s roboty řady Q a R
Snímky níže ukazují nastavení komunikace metodou CRn-Q/R. Počítač musí být zapojený pomocí ethernetového kabelu do portu na PLC. Příklad nastavení pro RT Toolbox3 Příklad nastavení pro RT Toolbox2Změna typu kontroléru CR800-D <--> CR800-R & CR800-D <--> CR800-Q
Tento článek popisuje změnu typu kontroléru CR800-D na typ CR800-R a CR800-D na typ CR800-Q. Při změně typu kontroléru se programy a parametry resetují do výchozího nastavení! This project contains information about changing controller CR800-D <--> ...Nastavení přídavné osy (externí)
Nastavení přídavné osy (externí) Tento článek popisuje, jak nastavit a naprogramovat přídavnou osu robota jako samostatný mechanismus (například otočný stůl). Detailní infromace jsou k nalezení v manuálu: ADDITIONAL AXIS FUNCTION INSTRUCTION MANUAL ...